论文总结-语义分割经典模型
本文最后更新于:2024年10月14日 下午
语义分割是图像分割中的基本任务,是指对于图像将每个像素都标注上对应的类别,不区分个体**。简单地说,我们需要将视觉输入的数据分为不同的语义可解释性类别。若是区分了个体数量,那么就是实例分割。
本文主要总结一些较为经典的语义分割模型,慢慢更新,主要是对U-Net、FCN、SegNet、PSPNet、DeepLab v1/v2/v3/v3+进行要点概括,论文的具体解读、链接和源码在每个标题之后。
U-Net
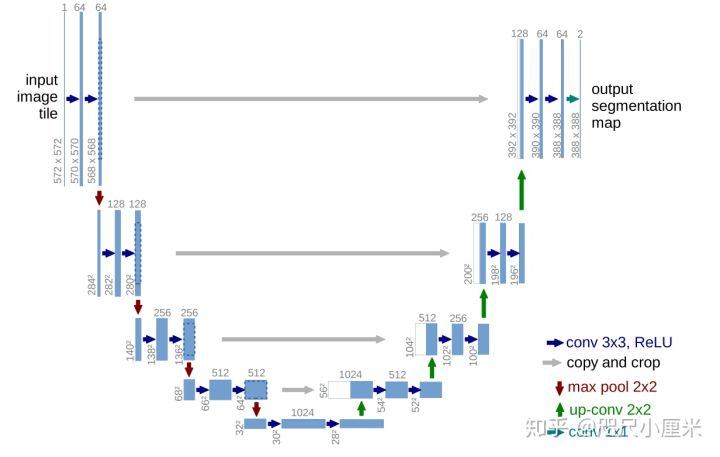
U-Net发表于2015年,用于医学细胞分割
编码器-解码器架构,四次下采样(maxpooling),四次上采样(转置卷积),形成了U型结构
U-Net最核心的一个思想是特征图的拼接
SGD+Momentum,损失函数为交叉熵
数据预处理使用了镜像边缘,可以更好细化边界信息
数据增加中有一个弹性形变,符合细胞本身的特性
可以应对小样本的数据集进行较快、有效地分割,能够泛化到很多应用场景中去
FCN:Fully Convolutional Networks
[论文笔记] FCN:Fully Convolutional Networks - 知乎 (zhihu.com)
- FCN发布于2014年,是语义分割领域全卷积网络的开山之作,U-Net也在其之后
- 其主要思路是将图像分类的网络改良成语义分割的网络,通过将分类器(全连接层)变成上采样层来恢复特征图的尺寸,进行端到端训练
- 分类器变成上采样,这部分思想作者主要的解释是全连接层是一种特殊的卷积
- 选择了AlexNet、GoogLeNet和VGG作为backbone(主干网络),VGG效果最好,但是推理最慢
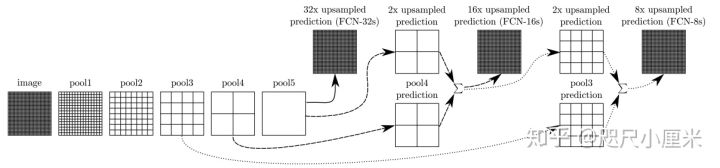
- 最核心的思想是特征图的融合:假设最后的输出为pool5产生的x,利用转置卷积上采样,放大32倍,得到FCN-32s;将x上采样放大2倍,和pool4产生的特征图直接相加,再上采样放大16倍,得到FCN-16s;将FCN-16s进行上采样放大2倍,与pool3产生的特征图直接相加,在放大8倍,得到FCN-8s。在实验中,FCN-8s的效果最好
- backbone是分类网络,下采样都是maxpooling,上采样使用的是双线性插值初始化的转置卷积
- 在PASCAL VOC 2012上达到了**62.2%**的mIoU
SegNet:A Deep Convolutional Encoder-Decoder Architecture for Image Segmentation
[论文笔记] SegNet: Encoder-Decoder Architecture - 知乎 (zhihu.com)
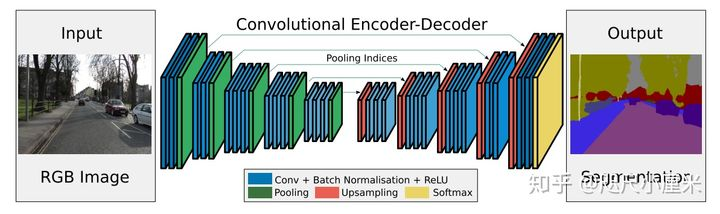
- SegNet发布于2015年,使用编码器-解码器结构
- 其backbone是2个VGG16,去掉全连接层(13层),对应形成编码器-解码器架构
- 最核心的想法是提出了maxpool的索引来上采样的方法,从而免去了学习上采样的需要,在推理阶段节省了内存
- 作者说道这个idea是来自于无监督特征学习。在解码器中重新使用编码器池化时的索引下标有这么几个优点:1. 能改善边缘的情况;2. 减少了模型的参数;3. 这种能容易就能整合到任何的编码器-解码器结构中,只需要稍稍改动
- 文章采用的数据集是CamVid road scene segmentation 和 SUN RGB-D indoor scene segmentation。之所以不用主流的Pascal VOC12,是因为作者认为VOC12的背景太不相同了,所以可能分割起来比较容易
- 总得来说,SegNet的性能比较一般,不如同时期的DeepLab v1,但是因为它只存储特征映射的maxpool索引,所以最推理阶段内存占用少,更为高效
PSPNet:Pyramid Scene Parsing Network
[论文笔记] PSPNet:Pyramid Scene Parsing Network - 知乎 (zhihu.com)
- PSPNet发布于2017年,CVPR 2017
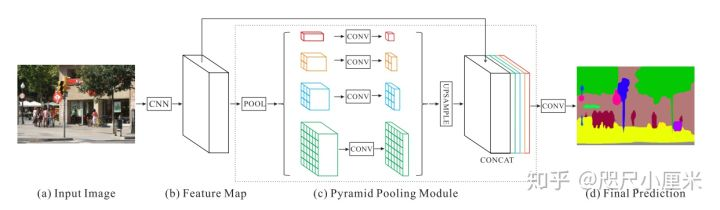
- 核心idea是提出了金字塔池化模块,模型带有空洞卷积
- 金字塔池化(Pyramid pooling)融合了四个比例的特征,**结合多尺寸信息:SPP(AVE效果优于MAX)**。最粗糙的 $1x1$是全局尺度的池化,剩下的层次会将图像分为不同子区域,形成不同区域的信息表示。金字塔池模块中不同level的输出包含比例不同的feature map(比如输入的维度都是 $2048$ ,有四个层次的金字塔,那么输出的维度则为 $2048/4=512$ )。为了保持全局特征的权重,若如果金字塔的数量为 ,则N在每个金字塔级别之后使用
1x1卷积层将上下文表示的维度减小到原先的1/N。然后直接对feature map进行双线性插值,恢复到输入的长宽上。最后,将不同level的特征拼接起来作为金字塔池化的全局特征。文中给出的金字塔池化模块是一个四级模块,其大小分别为1x1 2x2 3x3 6x6。 - 其backbone为修改Resnet-101 为 ResNet-103,而且有辅助 loss,上采样是双线性插值
- 性能上PASCAL VOC 2012:85.4%(pre-trained on COCO),82.6%;Cityscape:80.2% (both coarse and fine set)。
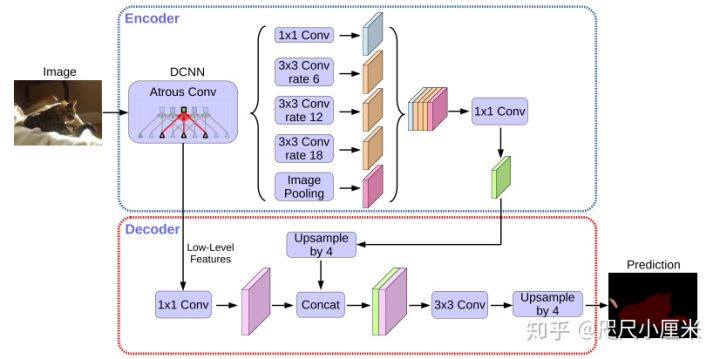
DeepLab v3+
- CVPR 2018
- 和v3的区别是多了一个解码器模块,backbone用了Aligned Xception(其中有深度可分解卷积)
- PASCAL VOC 2012达到了87.8%的mIOU,在JFT预训练的DeepLab v3+在PASCAL VOC 2012上至今领先,达到了89.0%,但是JFT-300M是谷歌的内部数据集,不开源
论文总结-语义分割经典模型
https://www.0error.net/2022/09/46066.html